Principal Investigator
Dr. Sayan Basu Roy
Assistant Professor
Indraprastha Institute of Information technology, IIIT-Delhi
Brief Details
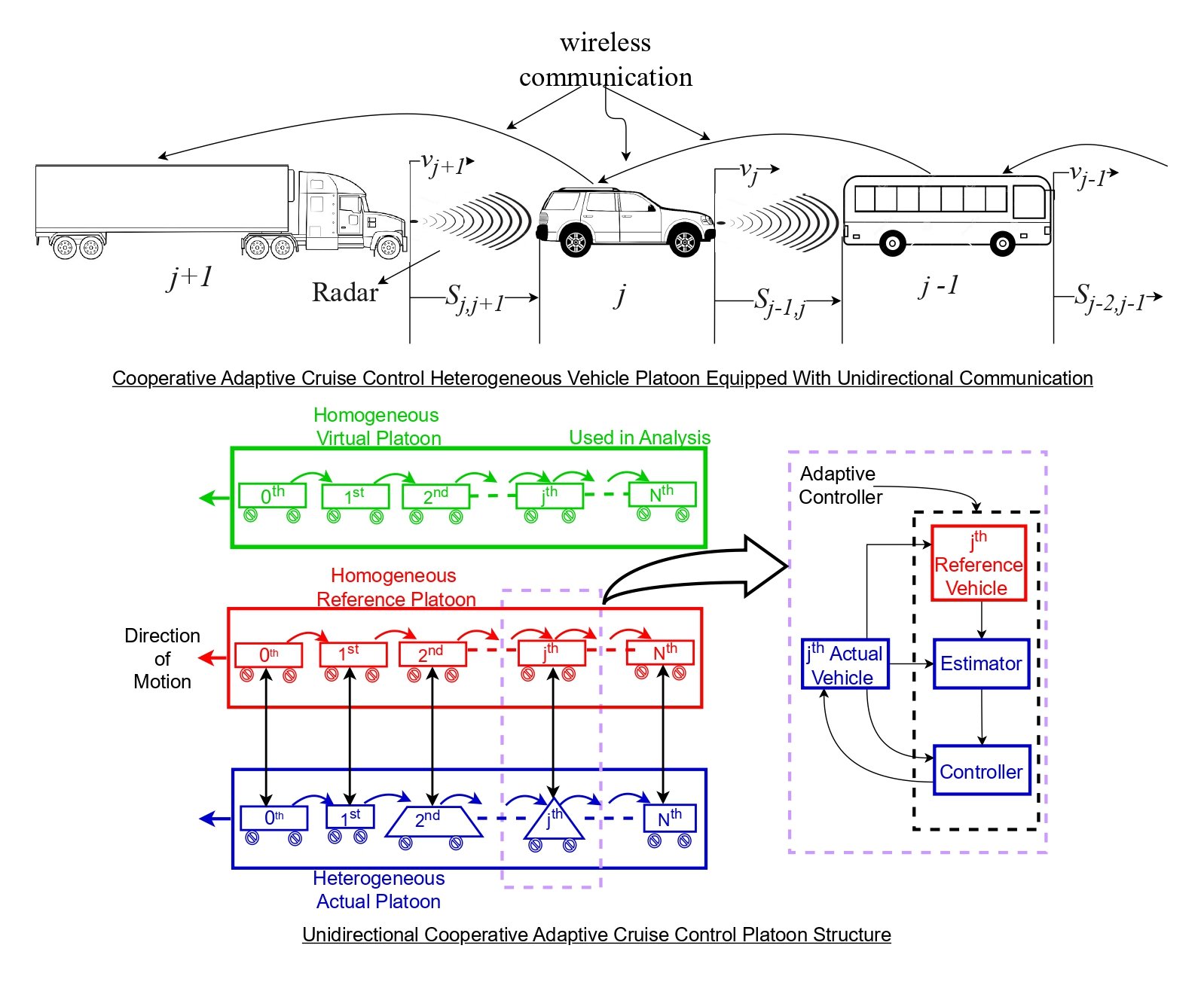
The project aims to develop new cooperative adaptive cruise control (CACC) algorithm for autonomous vehicle platooning in the presence of parametric uncertainty. The algorithms ensure stronger stability properties as compared to the state-of-the-art in CACC and guaranteed collision avoidance. Further we would explore resilient CACC architecture in the presence of cyber-physical-attacks.